前回までは、TransformerをPyTorch標準のnn.TransformerEncoderを使用して実装していた。
位置エンコーダに「Relative Position Representations」などを使用しようとした場合、Muliti head self-attentionの計算を変更する必要がある。
そのため、Muliti head self-attentionをnn.TransformerEncoderを使用せず、実装する必要がある。
PyTorch標準の実装
nn.TransformerEncoderをONNXにして、Netronで表示すると以下のようになっていた。
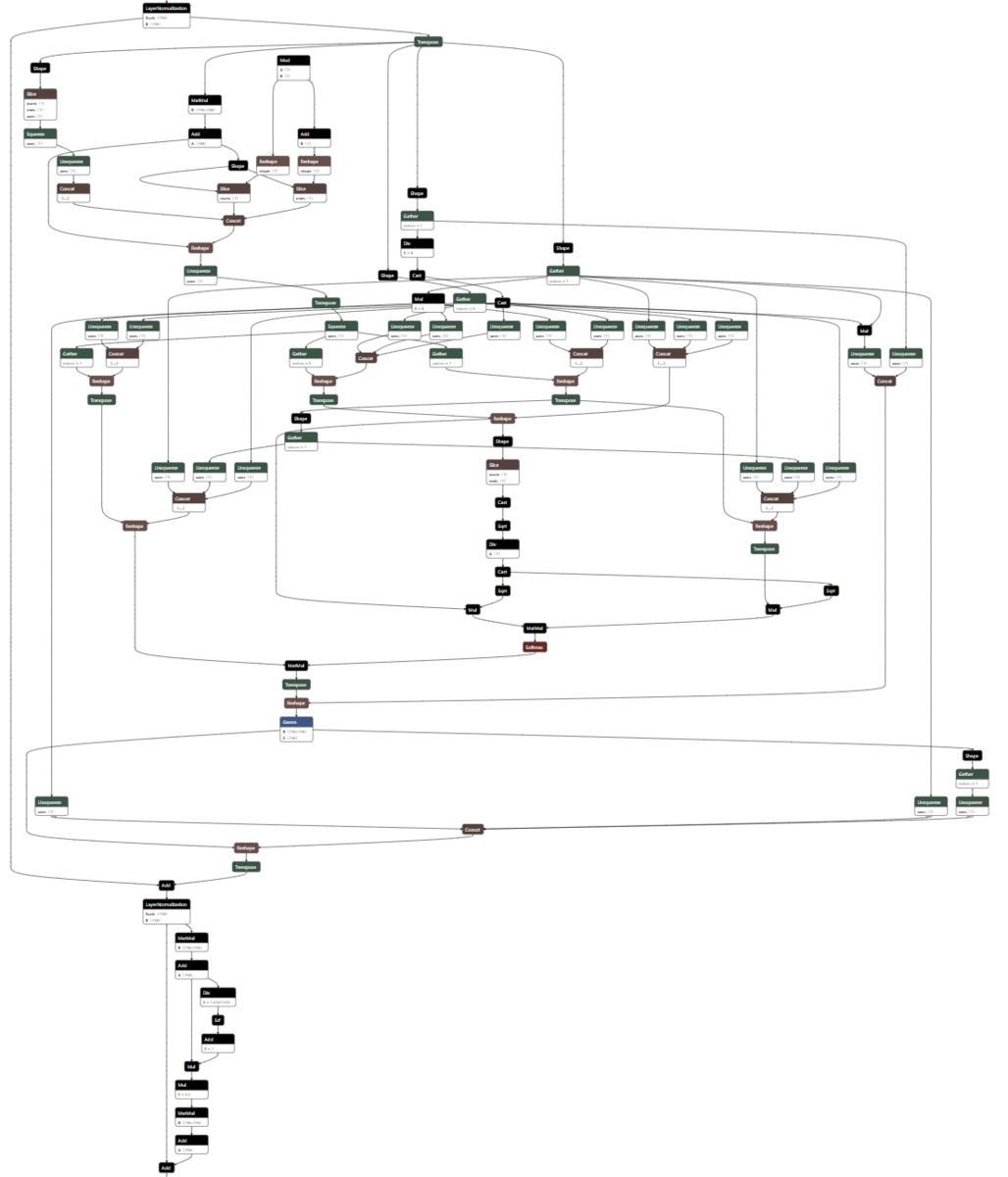
トークン長が可変のため複雑で、あまり実装の参考にできない。
Transformerの論文を参考に定義通り実装することにする。
![]()
独自実装
Q、K、Vの計算
ResNetの特徴マップとテンソルの次元が(batch_size, channels, hight, width)になるため、Q、K、Vのテンソルの計算は、カーネルサイズ1x1のConv2dを使うと効率化できる。
また、マルチヘッドは、groupsを使うことで実装できる。
Q、K、Vを1つのConv2Dで計算して、出力をchunkで分割する。
class TransformerEncoderLayer(nn.Module): def __init__(self, channels, d_model, nhead, dim_feedforward=256, dropout=0.1, activation=nn.GELU()): ... self.qkv_linear = nn.Conv2d(channels, 3 * d_model, kernel_size=1, groups=nhead, bias=False) self.o_linear = nn.Conv2d(d_model, d_model, kernel_size=1, bias=False) ... def forward(self, x): qkv = self.qkv_linear(x).squeeze(-1) q, k, v = qkv.chunk(3, dim=1) ...
Scaled dot product attentionの計算
Scaled dot product attentionの計算は、定義の通り計算する。
Conv2dで計算したq, k, vは、次元が(batch_size, d_model, seq_len)になっているので、ヘッドを分割して、matmulの計算用に次元を入れ替える。
Scaled dot product attentionの計算後、次元を元に戻す。
def forward(self, x): ... q = q.view(batch_size, self.nhead, self.depth, 81).transpose(2, 3) k = k.view(batch_size, self.nhead, self.depth, 81) v = v.view(batch_size, self.nhead, self.depth, 81).transpose(2, 3) scores = torch.matmul(q, k) / math.sqrt(self.depth) attention_weights = F.softmax(scores, dim=-1) attention_weights = self.attention_dropout(attention_weights) attended = torch.matmul(attention_weights, v) attended = attended.transpose(2, 3).contiguous().view(batch_size, self.d_model, 9, 9) attended = self.o_linear(attended) ...
FFNの計算
FFNは通常、2層のLinearで実装するが、カーネルサイズ1x1のConv2dで実装することにする。
Normalizationは、通常Layer normを使用するが、シーケンス長が固定のため、Batch Normalizationで実装する。
Normalizationの位置は、Post-normとする。
class TransformerEncoderLayer(nn.Module): def __init__(self, channels, d_model, nhead, dim_feedforward=256, dropout=0.1, activation=nn.GELU()): ... self.linear1 = nn.Conv2d(d_model, dim_feedforward, kernel_size=1, bias=False) self.linear2 = nn.Conv2d(dim_feedforward, channels, kernel_size=1, bias=False) self.final_dropout = nn.Dropout(dropout) self.norm1 = nn.BatchNorm2d(d_model) self.norm2 = nn.BatchNorm2d(channels) def forward(self, x): ... x = self.norm1(attended + x) feedforward = self.activation(self.linear1(x)) feedforward = self.linear2(feedforward) feedforward = self.final_dropout(feedforward) x = self.norm2(feedforward + x) return x
学習結果
独自実装したTransformerEncoderLayerで学習できるか確認した。
ネットワーク構成は、前回と同じResNet12ブロック256フィルタの後に、Transformer8層とする。
データは前回と同じで、4エポック学習した。
精度
| nhead | feed forward | 活性化関数 | val loss | policy acc. | value acc. | |
|---|---|---|---|---|---|---|
| ResNet | 2.5547 | 0.4136 | 0.6714 | |||
| PyTorch標準 | 8 | 256 | gelu | 2.5627 | 0.4124 | 0.6769 |
| 独自実装 | 8 | 256 | gelu | 2.5501 | 0.4145 | 0.6753 |
PyTorch標準と同等の精度になった。
若干精度が良くなっているが、シードを固定していないためランダムの影響と考える。
FFNをBatchNormalizationにしてPost-normにしたことも影響しているかもしれない。
モデル改良
ONNX
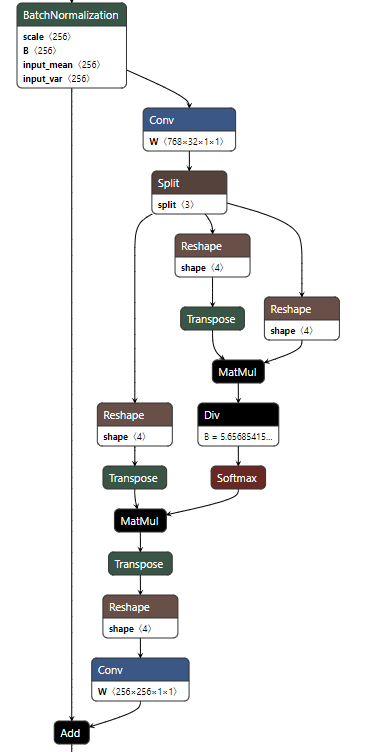
モデルをONNXにして、Multi head attentionの構造を確認すると以下のようになっていた。

想定よりも複雑になっていた。
以下の部分で、余計な演算が発生している。
qkv = self.qkv_linear(x).squeeze(-1) q, k, v = qkv.chunk(3, dim=1)
また、バッチサイズを、batch_size = x.size(0)で取得している部分でも演算が発生している。
batch_size = x.size(0) ... q = q.view(batch_size, self.nhead, self.depth, 81).transpose(2, 3) k = k.view(batch_size, self.nhead, self.depth, 81) v = v.view(batch_size, self.nhead, self.depth, 81).transpose(2, 3)
改良
固定値で演算が不要な部分は、演算が発生しないように修正した。
qkv = self.qkv_linear(x)
q, k, v = qkv.split((self.d_model, self.d_model, self.d_model), dim=1)
q = q.view(-1, self.nhead, self.depth, 81).transpose(2, 3)
k = k.view(-1, self.nhead, self.depth, 81)
v = v.view(-1, self.nhead, self.depth, 81).transpose(2, 3)
ONNXは、以下のように余計な演算がなくなりシンプルな構成になった。
精度
精度が変わっていないか確認した。
| nhead | feed forward | 活性化関数 | val loss | policy acc. | value acc. | |
|---|---|---|---|---|---|---|
| ResNet | 2.5547 | 0.4136 | 0.6714 | |||
| PyTorch標準 | 8 | 256 | gelu | 2.5627 | 0.4124 | 0.6769 |
| 独自実装 | 8 | 256 | gelu | 2.5501 | 0.4145 | 0.6753 |
| 改良版 | 8 | 256 | gelu | 2.5473 | 0.4132 | 0.6763 |
若干精度が良くなっているが、シードを固定していないためランダムの影響と考える。
学習時間
| nhead | feed forward | 活性化関数 | 学習時間 | |
|---|---|---|---|---|
| ResNet | 1:37 | |||
| PyTorch標準 | 8 | 256 | gelu | 1:58 |
| 独自実装 | 8 | 256 | gelu | 2:14 |
| 改良版 | 8 | 256 | gelu | 2:11 |
学習時間はほぼ同じである。
まとめ
TransformerをPyTorch標準のnn.TransformerEncoderを使わずに実装した。
PyTorch標準と比べて同等の精度となり、想定通り実装できていることが確認できた。
次は、相対位置エンコーダを実装したい。