Chainerの計算グラフの可視化機能を使ったことなかったので使ってみた。
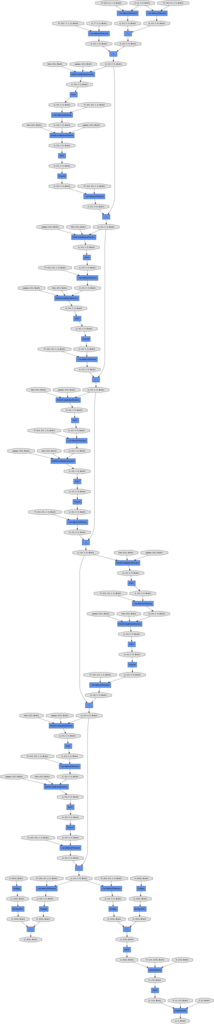
将棋AIのPolicy networkとValue networkを結合したWide ResNetを可視化してみた。
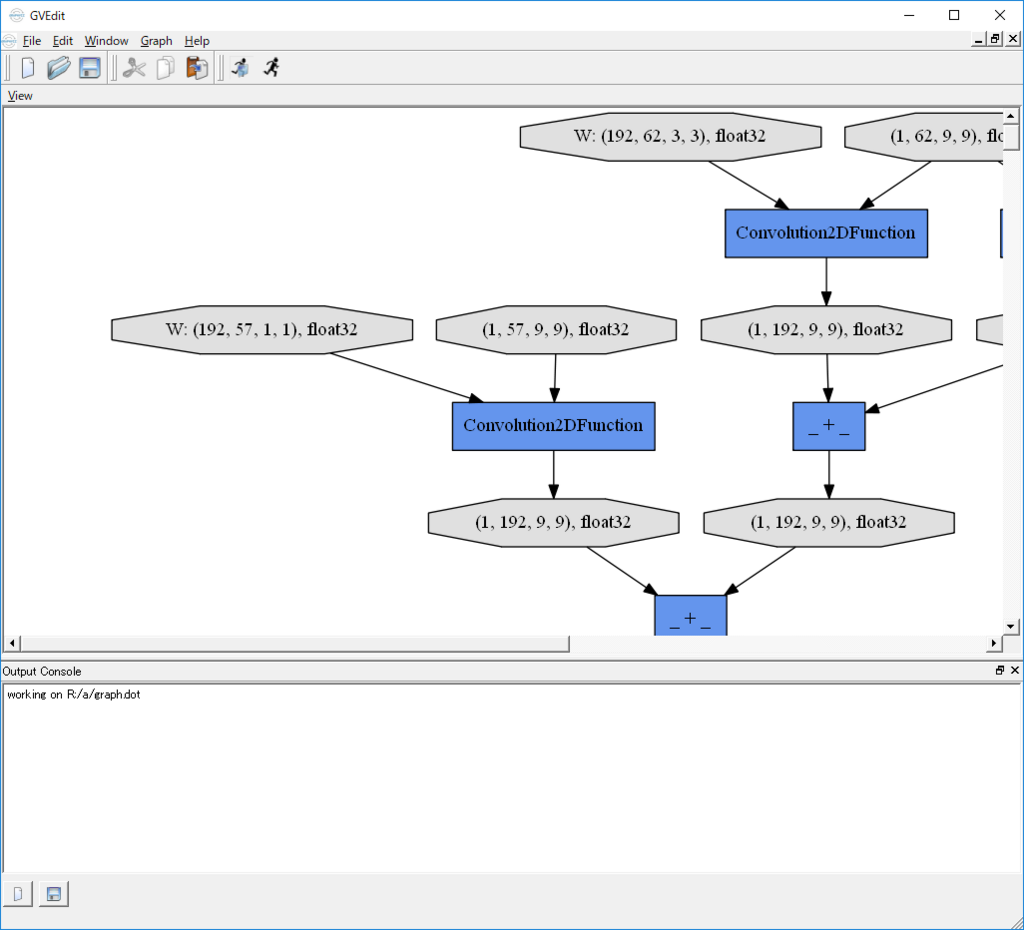
dotファイル出力
Visualization of Computational Graph — Chainer 7.8.1 documentation
このページの説明通り、モデルを構築し順伝播を実行し、出力のVariableを使用して、.dotファイルを作成する。
import numpy as np from chainer import Variable from chainer import Chain import chainer.functions as F import chainer.links as L import chainer.computational_graph as c FEATURES1_NUM=62 FEATURES2_NUM=57 MAX_MOVE_LABEL_NUM=101 k = 192 dropout_ratio = 0.1 fcl = 256 # fully connected layers class PolicyValueNetwork(Chain): def __init__(self): super(PolicyValueNetwork, self).__init__( l1_1_1=L.Convolution2D(in_channels = FEATURES1_NUM, out_channels = k, ksize = 3, pad = 1, nobias = True), l1_1_2=L.Convolution2D(in_channels = FEATURES1_NUM, out_channels = k, ksize = 1, pad = 0, nobias = True), l1_2=L.Convolution2D(in_channels = FEATURES2_NUM, out_channels = k, ksize = 1, nobias = True), # pieces_in_hand l2=L.Convolution2D(in_channels = k, out_channels = k, ksize = 3, pad = 1, nobias = True), l3=L.Convolution2D(in_channels = k, out_channels = k, ksize = 3, pad = 1, nobias = True), l4=L.Convolution2D(in_channels = k, out_channels = k, ksize = 3, pad = 1, nobias = True), l5=L.Convolution2D(in_channels = k, out_channels = k, ksize = 3, pad = 1, nobias = True), l6=L.Convolution2D(in_channels = k, out_channels = k, ksize = 3, pad = 1, nobias = True), l7=L.Convolution2D(in_channels = k, out_channels = k, ksize = 3, pad = 1, nobias = True), l8=L.Convolution2D(in_channels = k, out_channels = k, ksize = 3, pad = 1, nobias = True), l9=L.Convolution2D(in_channels = k, out_channels = k, ksize = 3, pad = 1, nobias = True), l10=L.Convolution2D(in_channels = k, out_channels = k, ksize = 3, pad = 1, nobias = True), l11=L.Convolution2D(in_channels = k, out_channels = k, ksize = 3, pad = 1, nobias = True), l12=L.Convolution2D(in_channels = k, out_channels = MAX_MOVE_LABEL_NUM, ksize = 1, nobias = True), l12_2=L.Bias(shape=(9*9*MAX_MOVE_LABEL_NUM)), # value network l12_v=L.Convolution2D(in_channels = k, out_channels = MAX_MOVE_LABEL_NUM, ksize = 1, nobias = True), l12_2_v=L.Bias(shape=(9*9*MAX_MOVE_LABEL_NUM)), l13=L.Linear(9*9*MAX_MOVE_LABEL_NUM, fcl), l14=L.Linear(fcl, 1), norm1=L.BatchNormalization(k), norm2=L.BatchNormalization(k), norm3=L.BatchNormalization(k), norm4=L.BatchNormalization(k), norm5=L.BatchNormalization(k), norm6=L.BatchNormalization(k), norm7=L.BatchNormalization(k), norm8=L.BatchNormalization(k), norm9=L.BatchNormalization(k), norm10=L.BatchNormalization(k) ) def __call__(self, x1, x2): u1_1_1 = self.l1_1_1(x1) u1_1_2 = self.l1_1_2(x1) u1_2 = self.l1_2(x2) u1 = u1_1_1 + u1_1_2 + u1_2 # Residual block h1 = F.relu(self.norm1(u1)) h2 = F.dropout(F.relu(self.norm2(self.l2(h1))), ratio=dropout_ratio) u3 = self.l3(h2) + u1 # Residual block h3 = F.relu(self.norm3(u3)) h4 = F.dropout(F.relu(self.norm4(self.l4(h3))), ratio=dropout_ratio) u5 = self.l5(h4) + u3 # Residual block h5 = F.relu(self.norm5(u5)) h6 = F.dropout(F.relu(self.norm6(self.l6(h5))), ratio=dropout_ratio) u7 = self.l7(h6) + u5 # Residual block h7 = F.relu(self.norm7(u7)) h8 = F.dropout(F.relu(self.norm8(self.l8(h7))), ratio=dropout_ratio) u9 = self.l9(h8) + u7 # Residual block h9 = F.relu(self.norm9(u9)) h10 = F.dropout(F.relu(self.norm10(self.l10(h9))), ratio=dropout_ratio) u11 = self.l11(h10) + u9 # output h12 = self.l12(u11) h12_1 = self.l12_2(F.reshape(h12, (len(h12.data), 9*9*MAX_MOVE_LABEL_NUM))) # value network h12_v = self.l12_v(u11) h12_2 = F.relu(self.l12_2_v(F.reshape(h12_v, (len(h12_v.data), 9*9*MAX_MOVE_LABEL_NUM)))) h13 = F.relu(self.l13(h12_2)) return h12_1, self.l14(h13) model = PolicyValueNetwork() features1 = np.empty((1, FEATURES1_NUM, 9, 9), dtype=np.float32) features2 = np.empty((1, FEATURES2_NUM, 9, 9), dtype=np.float32) x1 = Variable(features1) x2 = Variable(features2) y1, y2 = model(x1, x2) g = c.build_computational_graph([y1, y2]) with open('graph.dot', 'w') as o: o.write(g.dump())